






How Does Torque Affect Equilibrium in Real Life?
Torque and equilibrium are among the most fundamental concepts in rotational mechanics, forming a crucial part of JEE Physics. Understanding how forces produce rotational motion and how systems achieve or lose balance helps in analysing many real-life applications. In this article, Vedantu explains everything students need to know about torque and equilibrium for smooth exam preparation, including vector treatment and practical insights for problem-solving.
What is Torque?
Torque is a measure of the tendency of a force to rotate an object about an axis. It is similar in spirit to force in linear motion, but while force pushes or pulls an object, torque twists or turns it. Everyday actions such as opening a bottle cap or pushing a swing are governed by torque. The magnitude and direction of torque depend not only on the force applied but also on where and how the force is applied relative to the axis of rotation.
Torque Formula and Its Vector Nature
The fundamental torque formula is:
Torque = Force applied × lever arm
Here, the lever arm is the perpendicular distance from the axis of rotation to the line of action of the force. More precisely, torque can be expressed mathematically as:
\(\tau = r F \sin\theta\), where:
- \(\tau\): Torque (in Newton-metres, N·m)
- r: Distance from axis to application point (lever arm)
- F: Applied force
- \(\theta\): Angle between lever arm and force vector
Torque is a vector and follows the right-hand rule, pointing perpendicular to the plane formed by the position and force vectors. The cross product form, \(\vec{\tau} = \vec{r} \times \vec{F}\), captures both direction and magnitude precisely.
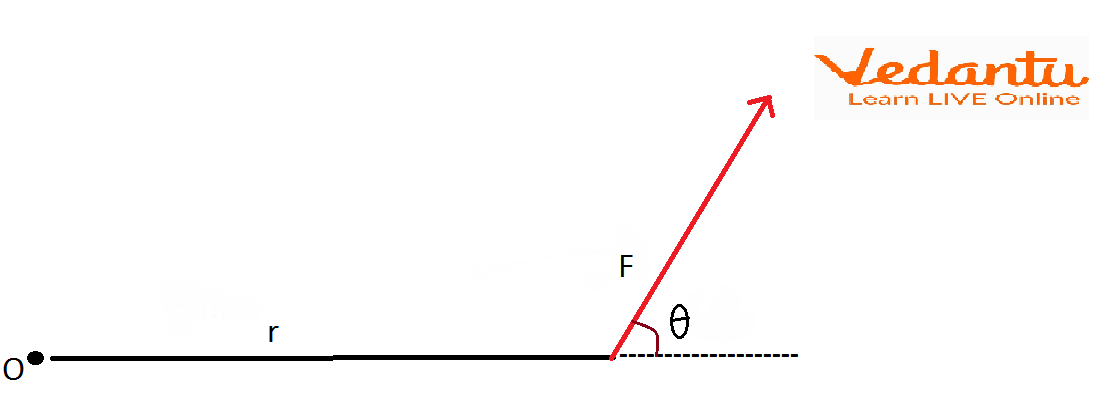
The Schematic Diagram of Torque
A schematic diagram of torque often shows a force acting at a distance from the axis, with the angle clearly marked between the force direction and lever arm. This visual representation is essential in understanding the calculation of torque in practical problems and laboratory settings.
Units and Dimensions of Torque
Torque is measured in newton-metres (N·m) in the SI system. In the CGS system, the unit is dyne-centimetre. Its dimensional formula is \([M L^2 T^{-2}]\), which matches that of work or energy, but physically they are distinct concepts. The symbol for torque is usually \(\tau\) or sometimes M.
| Parameter | Value |
|---|---|
| SI Unit | N·m |
| CGS Unit | dyne-cm |
| Symbol | \(\tau\) |
| Dimensions | [M L2 T-2] |
Equilibrium: Conditions and Types
A system is in equilibrium when there is no net force or net torque acting on it. This means the state of motion or rest does not change, and the object is perfectly balanced. The study of torque and equilibrium physics helps in analysing bridges, cranes, levers, and many physical systems.
The two essential conditions for equilibrium are:
- Sum of all forces is zero: \(\sum \vec{F} = 0\)
- Sum of all torques is zero: \(\sum \tau = 0\)
There are several types of equilibrium relevant in both theoretical problems and torque and equilibrium experiments:
- Stable Equilibrium: Returns to original position if disturbed.
- Unstable Equilibrium: Moves further away after a small disturbance.
- Neutral Equilibrium: Remains in new position when disturbed.
Determining the Direction of Torque
Because torque is a vector, assigning its physical direction is essential, especially when multiple forces act on a system. The right-hand rule is a practical way to identify this: curl the right-hand fingers in the direction of force application; the thumb points in the direction of the torque vector. For competing forces, choosing a consistent sign convention is critical for accurate calculations in both theoretical and experimental torque and equilibrium lab setups.
Real-Life Applications of Torque and Equilibrium
Torque and equilibrium problems arise everywhere, from engineering to biology. Everyday actions such as opening doors, steering vehicles, and even the human body's joint movements are explained through these principles. In torque and equilibrium lab experiments, understanding the correct placement and angle of force leads to safe, efficient, and balanced designs.
- Door hinges rely on optimal torque for easy opening
- Seesaws demonstrate balancing torques for stability
- Wrenches use torque to loosen or tighten bolts
- Crane arms maintain equilibrium under heavy loads
- Human limbs generate torque for various motions
- Wheel axles and propellers use calculated torque for rotation
Torques in Rotational Systems: Additional Considerations
Not every force generates torque. Only the component of force perpendicular to the lever arm does. Both the position of the force and its direction matter. In certain torque and equilibrium problems and solutions pdfs, you will find questions testing the understanding of these vector relationships. Sometimes, reaction torques prevent motion or balance applied torques to create equilibrium.
When solving complex systems, the principle of moments often comes into play: the sum of clockwise torques must equal the sum of anticlockwise torques for rotational equilibrium. Consulting resources like torque and equilibrium formula sheets or torque and equilibrium ppt summaries can also support revision and problem-solving.
Concept Integration: Moment of Inertia and Rotational Dynamics
The response of a body to an applied torque is governed partly by its moment of inertia, which quantifies resistance to rotational acceleration. Larger moment of inertia requires more torque for the same angular acceleration. For related conceptual depth, see Moment of Inertia Explained and torque and equilibrium lab report discussions. Rotational analogs of Newton's laws also rely on these ideas, particularly for rigorous JEE study.
Sample Calculations in Torque and Equilibrium
Suppose a 15 N force is applied perpendicularly at the end of a 0.5 m wrench from its pivot. The torque generated is simply \(\tau = Fr = 15~\mathrm{N} \times 0.5~\mathrm{m} = \mathbf{7.5}~\mathrm{N{\cdot}m}\). If the same force is instead applied at a \(30^\circ\) angle to the wrench, only \(\sin 30^\circ = 0.5\) of its effect induces rotation: \(\tau = 15~\mathrm{N} \times 0.5~\mathrm{m} \times 0.5 = \mathbf{3.75}~\mathrm{N{\cdot}m}\).
Advanced Problem Scenarios and Further Exploration
Torque and equilibrium lab and classroom explorations may involve not only single forces but distributed loads, couples, and multiple axes of rotation. Many torque and equilibrium problems can be modelled and understood using free body diagrams, resolving forces into components, and applying equilibrium conditions with precision. Vedantu's courses regularly emphasise these structured approaches for JEE success. To deepen your understanding, explore resources like Understanding Torque and Concept of Equilibrium on Vedantu.









FAQs on What Is Torque and Equilibrium?
1. What is torque in physics?
Torque is the measure of the turning effect produced by a force acting on an object about a pivot point, and is given by the product of force and the perpendicular distance from the axis of rotation.
Key points include:
- Torque (τ) = Force (F) × Perpendicular distance (r)
- It causes objects to rotate about an axis
- Standard unit: Newton-metre (N·m)
- Direction follows the right-hand rule
2. What is equilibrium in physics?
Equilibrium is a state where all the forces and torques acting on a body are balanced, resulting in no linear or rotational motion.
Types of equilibrium:
- Translational equilibrium: Net force is zero
- Rotational equilibrium: Net torque is zero
3. What are the conditions for equilibrium of a rigid body?
A rigid body is in equilibrium when both these conditions are satisfied:
- The vector sum of all forces is zero (ΣF = 0) – ensures no linear acceleration
- The vector sum of all torques about any axis is zero (Στ = 0) – ensures no rotational acceleration
4. How do you calculate torque with an example?
Torque is calculated by multiplying the force applied by its perpendicular distance from the axis of rotation.
Example steps:
- If a force of 5 N acts at a distance of 2 m from the pivot,
- Torque (τ) = 5 N × 2 m = 10 N·m
5. What is the difference between clockwise and anticlockwise torque?
The direction of torque depends on whether the force tends to rotate the object clockwise or anticlockwise about the pivot.
- Clockwise torque: Tries to rotate the object in the direction of a clock’s hands (often taken as negative)
- Anticlockwise torque: Rotates opposite to a clock’s hands (often taken as positive)
6. State the principle of moments.
The principle of moments states that for a body to be in rotational equilibrium, the sum of clockwise moments about a point must be equal to the sum of anticlockwise moments about the same point. Mathematically,
- Σ (Anticlockwise moments) = Σ (Clockwise moments)
7. How does centre of gravity affect rotational equilibrium?
The centre of gravity is the point where the weight of a body acts, and its position affects how the object's weight produces torque about any axis.
- If the line of action of weight passes through the base of an object, it remains in equilibrium
- If not, torque due to weight can cause rotation and topple the object
8. Explain the types of equilibrium with examples.
There are three main types of equilibrium:
- Stable equilibrium: Object returns to its original position after a small displacement (e.g., a ball in a bowl)
- Unstable equilibrium: Object moves further away after small disturbance (e.g., a ball on top of a hill)
- Neutral equilibrium: Object stays in new position after disturbance (e.g., a ball on a flat surface)
9. What is the lever arm in torque calculations?
Lever arm is the perpendicular distance from the axis of rotation to the line of action of the force.
- It determines the effectiveness of a force in producing rotation (torque)
- Increasing the lever arm increases the torque for the same force
10. Give examples of daily life applications of torque and equilibrium.
Applications of torque and equilibrium are widespread in daily life:
- Opening a door (torque applied by pushing at the edge)
- Balancing seesaws (equilibrium of moments)
- Using wrenches and spanners (lever arm increases torque)
- Keeping ladders stable (equilibrium stability)
11. What is rotational equilibrium?
Rotational equilibrium is achieved when the net torque acting on a body is zero, so the object does not rotate or rotates with constant angular velocity.
- Σ torque (Στ) = 0
12. Why does the direction of torque matter?
The direction of torque determines whether an object will rotate clockwise or anticlockwise.
- It is essential for solving equilibrium problems where torques can cancel each other
- Correct assignment of positive (anticlockwise) and negative (clockwise) is crucial